jueves, 19 de enero de 2012
" TIPOS DE ROBOTS"
Existen diferentes tipos y clases de robots, entre ellos con forma humana, de animales, de plantas o incluso de elementos arquitectónicos pero todos se diferencian por sus capacidades y se clasifican en 4 formas:
- Androides: robots con forma humana. Imitan el comportamiento de las personas, su utilidad en la actualidad es de solo experimentación. La principal limitante de este modelo es la implementación del equilibrio en el desplazamiento, pues es bípedo.
- Móviles: se desplazan mediante una plataforma rodante (ruedas); estos robots aseguran el transporte de piezas de un punto a otro.
- Zoomórficos: es un sistema de locomoción imitando a los animales. La aplicación de estos robots sirve, sobre todo, para el estudio de volcanes y exploración espacial.
- Poliarticulados: mueven sus extremidades con pocos grados de libertad. Su principal utilidad es industrial, para desplazar elementos que requieren cuidados.
"LEYES ROBÓTICAS "
En ciencia ficción las tres leyes de la robótica son un conjunto de normas escritas por Isaac Asimov, que la mayoría de los robots de sus novelas y cuentos están diseñados para cumplir. En ese universo, las leyes son "formulaciones matemáticas impresas en los senderos positrónicos del cerebro" de los robots (líneas de código del programa de funcionamiento del robot guardadas en la ROM del mismo). Aparecidas por primera vez en el relato Runaround (1942), establecen lo siguiente:
Un robot no puede hacer daño a un ser humano o, por inacción, permitir que un ser humano sufra daño.
- Un robot debe obedecer las órdenes dadas por los seres humanos, excepto si estas órdenes entrasen en conflicto con la Primera Ley.
- Un robot debe proteger su propia existencia en la medida en que esta protección no entre en conflicto con la Primera o la Segunda Ley.
" ROBOTS"
Un robot es una entidad virtual o mecánica artificial. En la práctica, esto es por lo general un sistema electromecánico que, por su apariencia o sus movimientos, ofrece la sensación de tener un propósito propio. La palabra robot puede referirse tanto a mecanismos físicos como a sistemas virtuales de software, aunque suele aludirse a los segundos con el término de bots.

No hay un consenso sobre qué máquinas pueden ser consideradas robots, pero sí existe un acuerdo general entre los expertos y el público sobre que los robots tienden a hacer parte o todo lo que sigue: moverse, hacer funcionar un brazo mecánico, sentir y manipular su entorno y mostrar un comportamiento inteligente, especialmente si ese comportamiento imita al de los humanos o a otros animales.
Un robot es una entidad virtual o mecánica artificial. En la práctica, esto es por lo general un sistema electromecánico que, por su apariencia o sus movimientos, ofrece la sensación de tener un propósito propio. La palabra robot puede referirse tanto a mecanismos físicos como a sistemas virtuales de software, aunque suele aludirse a los segundos con el término de bots.
No hay un consenso sobre qué máquinas pueden ser consideradas robots, pero sí existe un acuerdo general entre los expertos y el público sobre que los robots tienden a hacer parte o todo lo que sigue: moverse, hacer funcionar un brazo mecánico, sentir y manipular su entorno y mostrar un comportamiento inteligente, especialmente si ese comportamiento imita al de los humanos o a otros animales.
" ROBOTS MOVILES "
Un robot es una entidad virtual o mecánica artificial. En la práctica, esto es por lo general un sistema electromecánico que, por su apariencia o sus movimientos, ofrece la sensación de tener un propósito propio. La palabra robot puede referirse tanto a mecanismos físicos como a sistemas virtuales de software, aunque suele aludirse a los segundos con el término de bots.

Un robot es una entidad virtual o mecánica artificial. En la práctica, esto es por lo general un sistema electromecánico que, por su apariencia o sus movimientos, ofrece la sensación de tener un propósito propio. La palabra robot puede referirse tanto a mecanismos físicos como a sistemas virtuales de software, aunque suele aludirse a los segundos con el término de bots.
viernes, 13 de enero de 2012
Red neuronal artificial
.

Red neuronal artificial perceptrón simple con n neuronas de entrada, m neuronas en su capa oculta y una neurona de escape.
"PROPIEDADES"
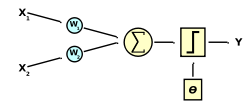 Una función de propagación (también conocida como función de excitación), que por lo general consiste en el sumatorio de cada entrada multiplicada por el peso de su interconexión (valor neto). Si el peso es positivo, la conexión se denomina excitatoria; si es negativo, se denomina inhibitoria.
Una función de propagación (también conocida como función de excitación), que por lo general consiste en el sumatorio de cada entrada multiplicada por el peso de su interconexión (valor neto). Si el peso es positivo, la conexión se denomina excitatoria; si es negativo, se denomina inhibitoria.- Una función de activación, que modifica a la anterior. Puede no existir, siendo en este caso la salida la misma función de propagación.
- Una función de transferencia, que se aplica al valor devuelto por la función de activación. Se utiliza para acotar la salida de la neurona y generalmente viene dada por la interpretación que queramos darle a dichas salidas. Algunas de las más utilizadas son la función sigmoidea (para obtener valores en el intervalo [0,1]) y la tangente hiperbólica (para obtener valores en el intervalo [-1,1]).

" SUPER COMPUTADORAS "
Una Supercomputadora o superordenador es aquella con capacidades de cálculo muy superiores a las comunes para la misma época de fabricación. Para la fecha cuando hacemos este escrito (2011), los superordenadores más rápidos funcionan en aproximadamente más de 200 teraflops (que en la jerga de la computación significa que realiza trillones de operaciones por segundo).
"CARACTERÍSTICAS"
Velocidad de Proceso: miles de millones de instrucciones de coma flotante por segundo.
- Usuarios a la vez: hasta miles, en entorno de redes amplias.
- Tamaño: requieren instalaciones especiales y aire acondicionado industrial.
- Dificultad de uso: solo para especialistas.
- Clientes usuales: grandes centros de investigación.
- Penetración social: prácticamente nula.
- Impacto social: muy importante en el ámbito de la investigación, ya que provee cálculos a alta velocidad de procesamiento, permitiendo, por ejemplo, calcular en secuencia el genoma humano, número Pi, desarrollar cálculos de problemas físicos dejando un margen de error muy bajo, etc.
- Parques instalados: menos de un millar en todo el mundo.
- Costo: hasta decenas de millones de dólares cada una de ellas.
" Principales usos"
Las supercomputadoras se utilizan para abordar problemas muy complejos o que no pueden realizarse en del mundo físico bien sea porque son peligrosos, involucran cosas increíblemente pequeñas o increíblemente grandes. A continuación damos algunos ejemplos:
Mediante el uso de supercomputadoras, los investigadores modelan el clima pasado y el clima actual y predicen el clima futuro .
- Los astrónomos y los científicos del espacio utilizan las supercomputadoras para estudiar el Sol y el clima espacial.
- Los científicos usan supercomputadoras para simular de qué manera un tsunami podría afectar una determinada costa o ciudad.
- Las supercomputadoras se utilizan para simular explosiones de supernovas en el espacio.
- Las supercomputadoras se utilizan para probar la aerodinámica de los más recientes aviones militares.
- Las supercomputadoras se están utilizando para modelar cómo se doblan las proteínas y cómo ese plegamiento puede afectar a la gente que sufre la enfermedad de Alzheimer, la fibrosis enquistada y muchos tipos de cáncer.
- Las supercomputadoras se utilizan para modelar explosiones nucleares, limitando la necesidad de verdaderas pruebas nucleares .
" Inteligencia artificial "
 En ciencias de la Computación se denomina inteligencia artificial (IA) a las inteligencias no naturales en agentes racionales no vivos, es la disciplina que se encarga de construir procesos que al ser ejecutados sobre una arquitectura física producen acciones o resultados que maximizan una medida de rendimiento determinada, basándose en la secuencia de entradas percibidas y en el conocimiento almacenado en tal arquitectura.
En ciencias de la Computación se denomina inteligencia artificial (IA) a las inteligencias no naturales en agentes racionales no vivos, es la disciplina que se encarga de construir procesos que al ser ejecutados sobre una arquitectura física producen acciones o resultados que maximizan una medida de rendimiento determinada, basándose en la secuencia de entradas percibidas y en el conocimiento almacenado en tal arquitectura.
También se distinguen varios tipos de procesos válidos para obtener resultados racionales, que determinan el tipo de agente inteligente.
También se distinguen varios tipos de procesos válidos para obtener resultados racionales, que determinan el tipo de agente inteligente. De más simples a más complejos, los cinco principales tipos de procesos son:
 En ciencias de la Computación se denomina inteligencia artificial (IA) a las inteligencias no naturales en agentes racionales no vivos, es la disciplina que se encarga de construir procesos que al ser ejecutados sobre una arquitectura física producen acciones o resultados que maximizan una medida de rendimiento determinada, basándose en la secuencia de entradas percibidas y en el conocimiento almacenado en tal arquitectura.
En ciencias de la Computación se denomina inteligencia artificial (IA) a las inteligencias no naturales en agentes racionales no vivos, es la disciplina que se encarga de construir procesos que al ser ejecutados sobre una arquitectura física producen acciones o resultados que maximizan una medida de rendimiento determinada, basándose en la secuencia de entradas percibidas y en el conocimiento almacenado en tal arquitectura."Es la ciencia e ingeniería de hacer máquinas inteligentes, especialmente programas de cómputo inteligentes."
También se distinguen varios tipos de procesos válidos para obtener resultados racionales, que determinan el tipo de agente inteligente. De más simples a más complejos, los cinco principales tipos de procesos son:
- Ejecución de una respuesta predeterminada por cada entrada (análogas a actos reflejos en seres vivos).
- Búsqueda del estado requerido en el conjunto de los estados producidos por las acciones posibles.
Algoritmos genéticos (análogo al proceso de evolución de las cadenas de ADN).
- Redes neuronales artificiales (análogo al funcionamiento físico del cerebro de animales y humanos).
- Razonamiento mediante una lógica formal (análogo al pensamiento abstracto .
“Ergonomía, inteligencia artificial, supercomputadoras y redes neuronales” (artificiales)
"ERGONOMÍA"


La Ergonomía es el estudio de la conducta y las actividades de las personas adecuando los sistemas y puestos de trabajo a las necesidades de los usuarios.
La palabra ERGONOMÍA se deriva de las palabras griegas "ergos", que significa trabajo, y "nomos", leyes; por lo que literalmente significa "leyes del trabajo" y podemos decir que es la actividad de carácter multidisciplinar encargada de la conducta y las actividades, con la finalidad de adecuar los productos, sistemas, puestos de trabajo y entornos.
Existen diferentes clasificaciones de las áreas donde interviene el trabajo de los ergonomistas, en general podemos considerar las siguientes:
- Antropometría.
- Biomecánica y fisiología.
- Ergonomía ambiental.
- Ergonomía cognitiva.
- Ergonomía de diseño y evaluación.
- Ergonomía de necesidades específicas.
- Ergonomía preventiva.
Antropometría
La antropometría es una de las áreas que fundamentan la ergonomía, y trata con las medidas del cuerpo humano que se refieren al tamaño del cuerpo, formas, fuerza y capacidad de trabajo.
En la ergonomía, los datos antropométricos son utilizados para diseñar los espacios de trabajo, herramientas, equipo de seguridad y protección personal, considerando las diferencias entre las características, capacidades y límites físicos del cuerpo humano.
En la ergonomía, los datos antropométricos son utilizados para diseñar los espacios de trabajo, herramientas, equipo de seguridad y protección personal, considerando las diferencias entre las características, capacidades y límites físicos del cuerpo humano.
jueves, 5 de enero de 2012
" Fibra óptica"
La fibra óptica es una guía de onda en forma de hilo de material altamente transparente diseñado para transmitir información a grandes distancias utilizando señales ópticas. La fibra óptica es el medio de transmisión preponderante en las redes de comunicación óptica. La fibra se utiliza en lugar de los cables metálicos convencionales con la ventaja de que tiene un ancho de banda notablemente superior, menores atenuaciones y mayor inmunidad al ruido electromagnético.

La fibra monomodo tiene la menor atenuación y el mayor ancho de banda de todos los tipos de fibra óptica. La electrónica de transmisión, recepción y repetición también es más cara que la de los sistemas multimodo. 
La distinta velocidad de propagación de cada modo (dispersión modal) se puede optimizar con un diseño adecuado. La fibra multimodo precisa una electrónica y conectores más baratos 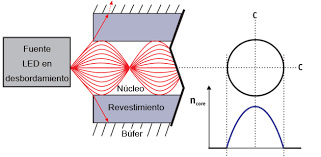
La fibra óptica es una guía de onda en forma de hilo de material altamente transparente diseñado para transmitir información a grandes distancias utilizando señales ópticas. La fibra óptica es el medio de transmisión preponderante en las redes de comunicación óptica. La fibra se utiliza en lugar de los cables metálicos convencionales con la ventaja de que tiene un ancho de banda notablemente superior, menores atenuaciones y mayor inmunidad al ruido electromagnético.
Tipos de Fibra
En comunicaciones óptica se emplean dos tipor de fibra: monomodo y multimodo.Fibras Monomodo
Las fibras monomodo están compuestas de un hilo de núcleo de muy pequeño diámetro (<10um) que soporta un solo modo de transmisión luminosa.Fibra Multimodo
Las fibras multimodo están formadas por un núcleo de mayor diámetro que las monomodo (50 o 62.5 micras) y en consecuencia los haces de luz pueden circular por más de un modo o camino (diferentes trayectorias de luz en el núcleo). Dependiendo de las características del emisor y el medio, la potencia luminosa del pulso se divide sobre todos o parte de los modos.
Suscribirse a:
Entradas (Atom)